

ArtGallery3D (AG3D)
R. Bigazzi, F. Landi, S.Cascianelli, M. Cornia, L. Baraldi, R. Cucchiara
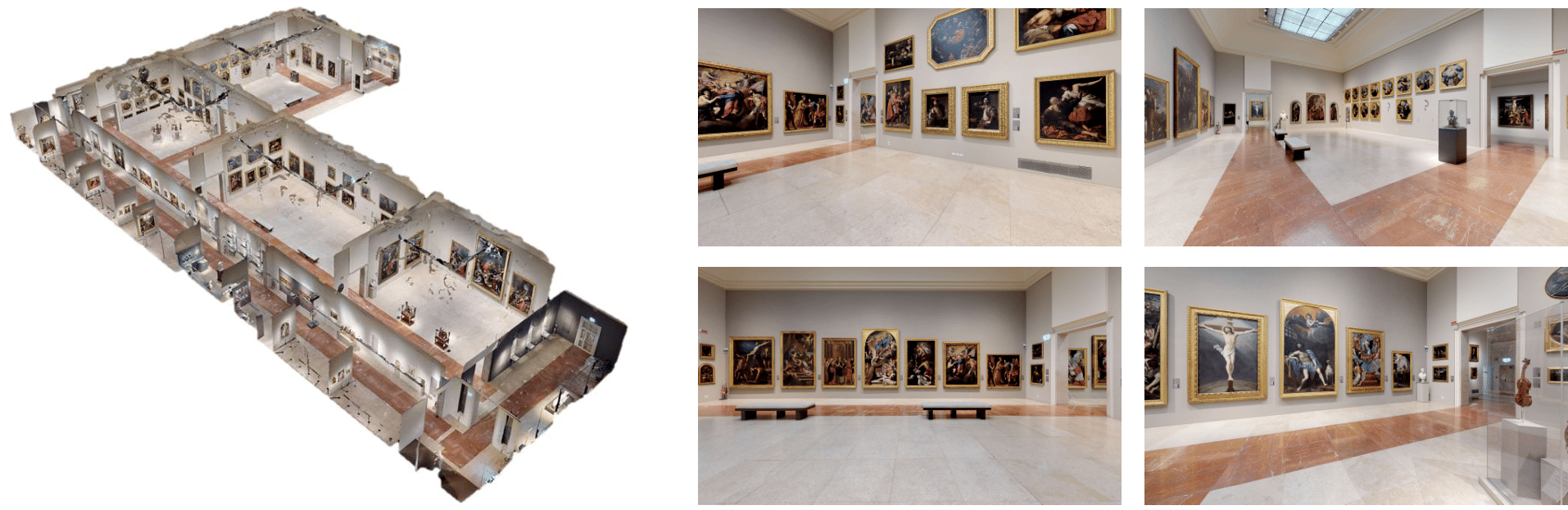
ArtGallery3D (AG3D) is a 3D model of a museum for embodied exploration and navigation presenting unique features when compared to flats and offices contained in traditional embodied datasets. First, the dimension of the rooms drastically increases, and the same goes for the size of the building itself. In our 3D model, some rooms are as big as 20×15 meters, while the floor hosting the art gallery spans a total of 2,000 square meters. However, dimensions are not the only difference with current available 3D spaces. As a second factor, the presented gallery is incredibly rich in visual features, offering multiple paintings, sculptures, and rare objects of historical and artistic interest.
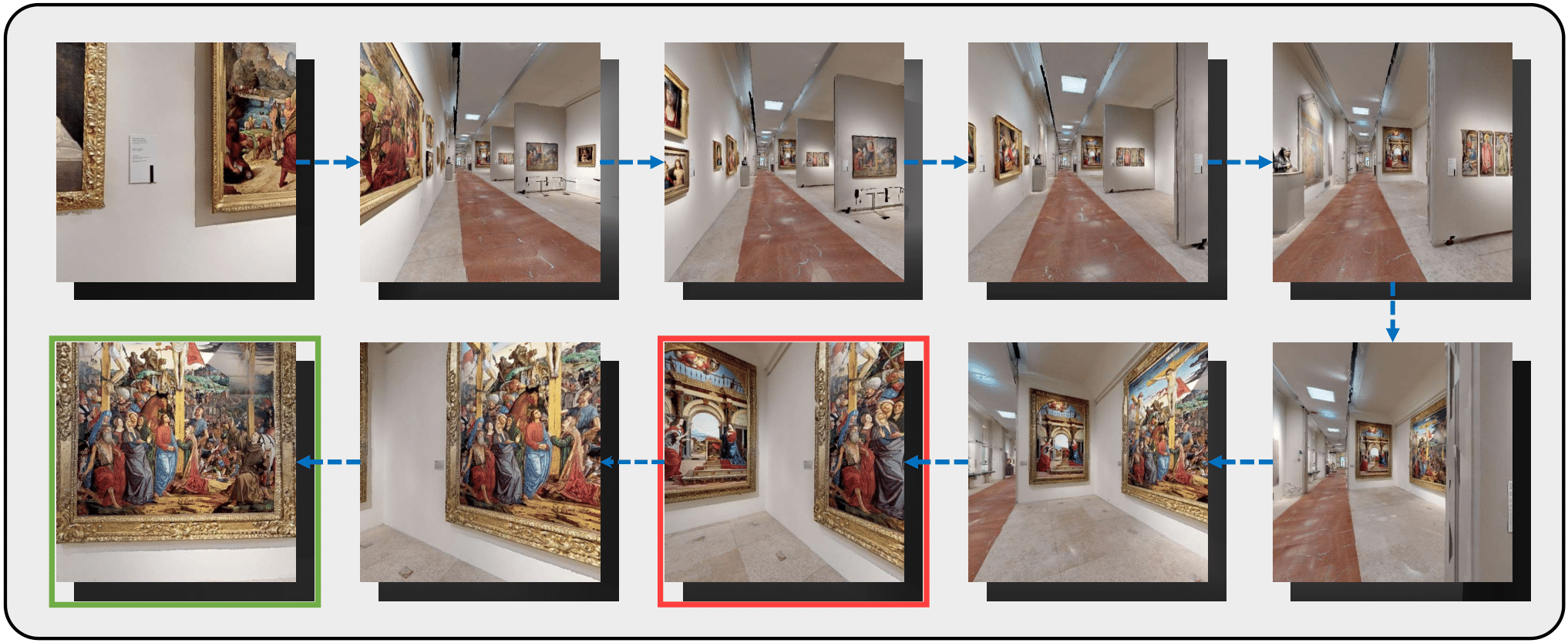
The dataset contains also episodes for embodied exploration and navigation. For the navigation task, we annotate the position of most of the points of interest in the museum. Examples include numerous paintings, sculptures, and other relevant objects.
Please cite with the following BibTeX:
@inproceedings{bigazzi2022embodied,
title={Embodied Navigation at the Art Gallery},
author={Bigazzi, Roberto and Landi, Federico and Cascianelli, Silvia and Cornia, Marcella and Baraldi, Lorenzo and Cucchiara, Rita},
booktitle={21st International Conference on Image Analysis and Processing},
year={2022}
}
Dataset info
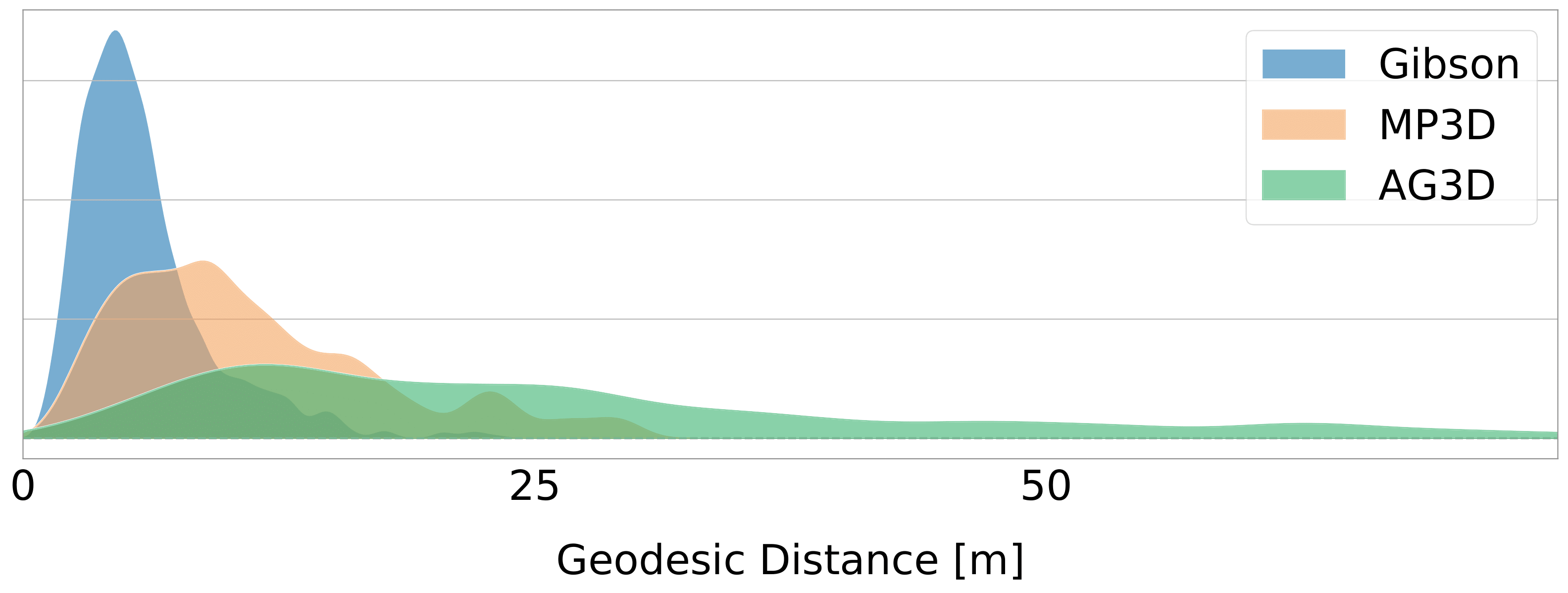
To create the navigation dataset we annotate 147 points of interest mostly consisting of paintings and statues. The annotated goal position is around 1 meter in front of the artwork and the goal orientation vector is directed to its center. For each point of interest, we define three episodes with different difficulties based on the geodesic distance between start and goal positions: easy (< 15m), medium (> 15m), and difficult (> 30m). In particular, thanks to the dimension of the acquired environment, each difficult episode has a geodesic distance larger than the longest path of MatterPort3D and Gibson datasets.
The exploration task dataset contains 500k, 100, 1000 episodes respectively for training, validation, and test.
The PointNav++ dataset includes 411 annotated navigation episodes.
Contacts
If you have any doubts about our dataset, please use the public issues section on this github repo. Alternatively, drop us an e-mail at roberto.bigazzi [at] unimore.it.
Acknowledgment
This work was supported by “Fondazione di Modena” and the “European Training Network on PErsonalized Robotics as SErvice Oriented applications” (PERSEO) MSCA-ITN-2020 project (G.A. 955778).